Everything
Explanation
How to
Comparison
Write for us
About us
Amazon Disclaimer
Privacy Policy
Terms and Conditions
Menu
Everything
Explanation
How to
Comparison
Write for us
About us
Amazon Disclaimer
Privacy Policy
Terms and Conditions
Search
Close
Everything
Explanation
How to
Comparison
Write for us
About us
Amazon Disclaimer
Privacy Policy
Terms and Conditions
Menu
Everything
Explanation
How to
Comparison
Write for us
About us
Amazon Disclaimer
Privacy Policy
Terms and Conditions
Search
Close
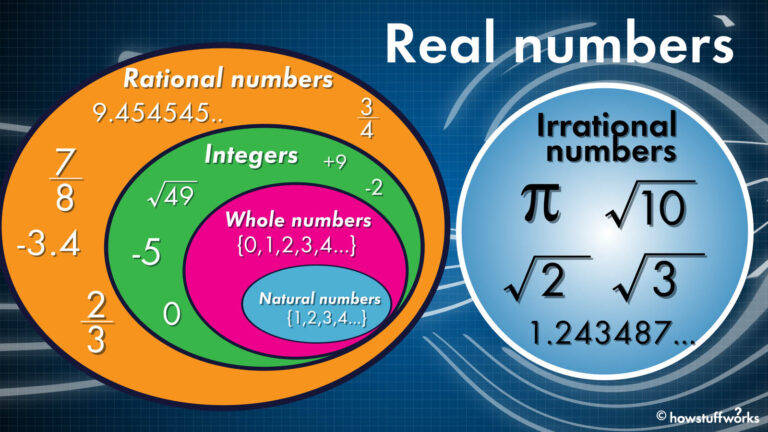
How to find rational numbers between two whole numbers
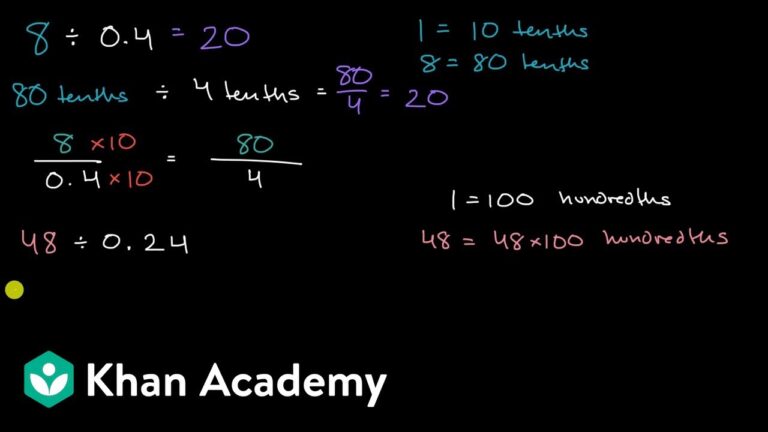
What is division of whole numbers
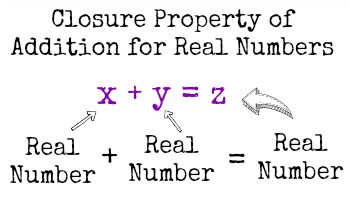
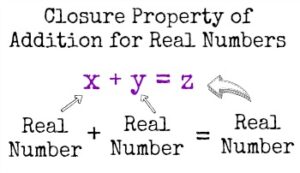
What are whole numbers closed under
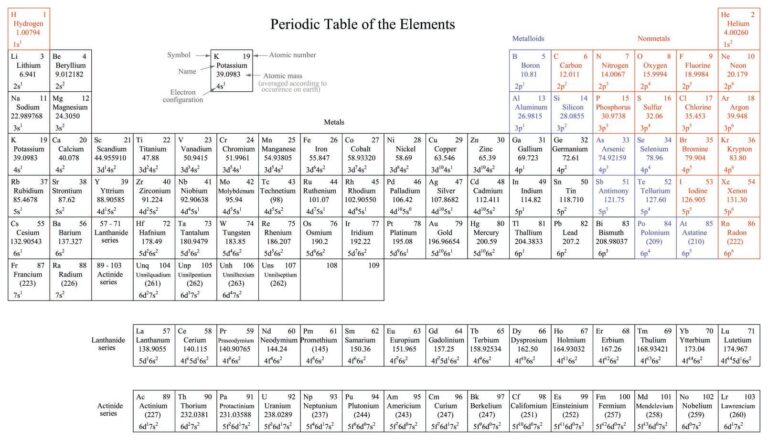
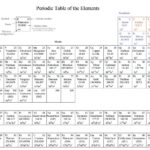
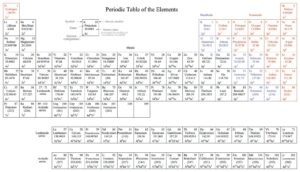
Why are the atomic masses not whole numbers
How do you compare whole numbers through the millions
Featured News
How to find rational numbers between two whole numbers
What is division of whole numbers
Advertising
Recent News
How to find rational numbers between two whole numbers
What is division of whole numbers
What are whole numbers closed under
Why are the atomic masses not whole numbers
How do you compare whole numbers through the millions
Are all whole numbers also natural numbers
How to divide surds by whole numbers
What is the difference between counting numbers and whole numbers
Editor's Pick
How to find rational numbers between two whole numbers
What is division of whole numbers
What are whole numbers closed under
Why are the atomic masses not whole numbers
How do you compare whole numbers through the millions
Are all whole numbers also natural numbers
More News
How to find rational numbers between two whole numbers
What is division of whole numbers
What are whole numbers closed under
Why are the atomic masses not whole numbers
How do you compare whole numbers through the millions
Are all whole numbers also natural numbers
How to divide surds by whole numbers
What is the difference between counting numbers and whole numbers